Welcome to my personal website! My name is Chendi Lin (林晨笛) and currently I am leading Trajectory Selection component at AutoX. Previously I worked at Waymo in the behavior planning of trucking team as a Software Engineer. I graduated as a Master student in Robotics at Carnagie Mellon University, and I obtained my Bachalor degree in Engineering Mechanics at University of Illinois, Urbana-Champaign. Traveling, sports, and writing are the activities that take up most of my free time. I am also on my way to an amateur playwright.
Check out About Me and CV tabs for my detailed academic and industrial experiences. My life outside of work is briefly introduced in Here and There.
Carpe diem.
Research
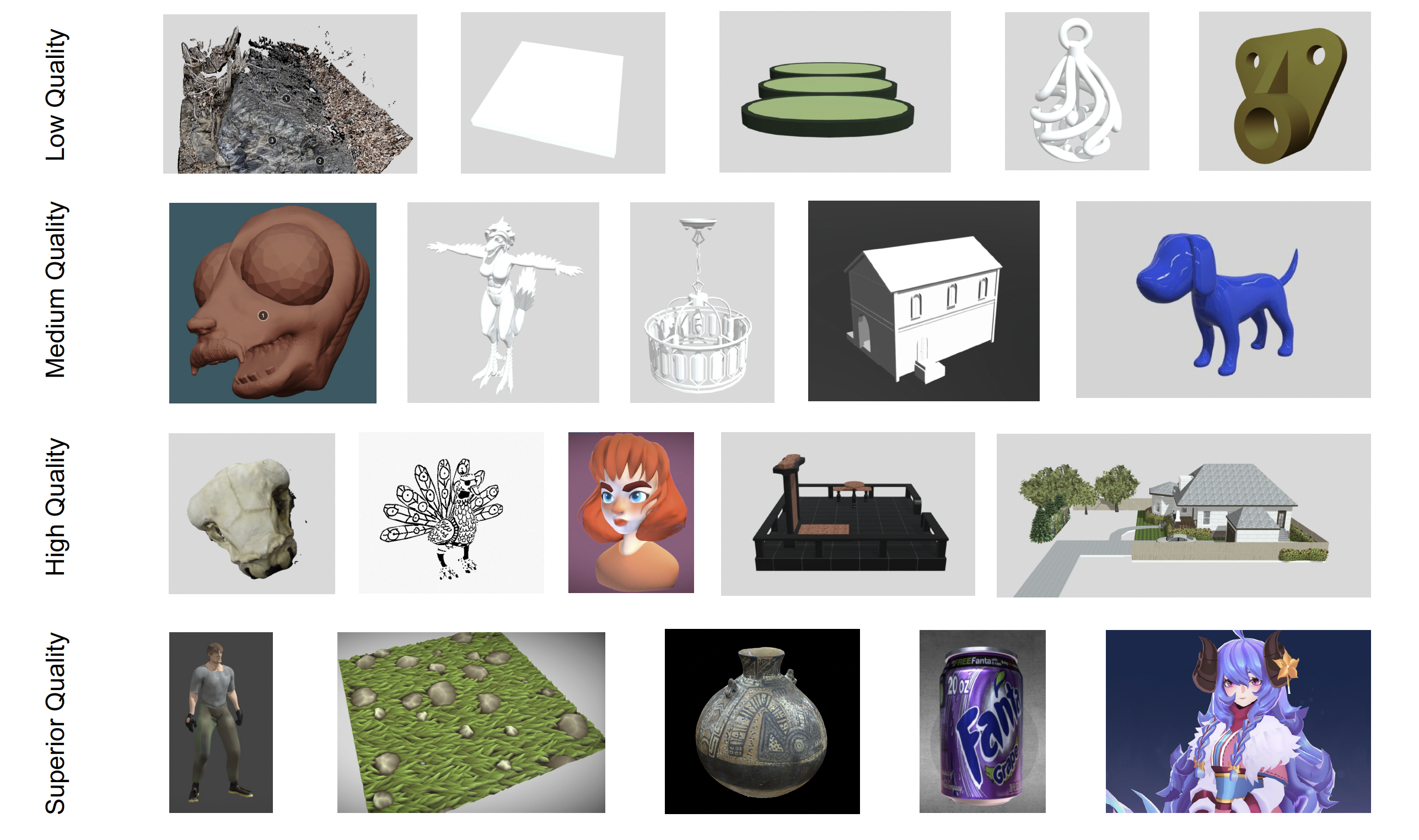
- Objaverse++: Curated 3D Object Dataset with Quality Annotations
1st Workshop on Curated Data for Efficient Learning (CDEL) ICCV Workshop, 2025 (Oral presentation)
Chendi Lin, Heshan Liu, Qunshu Lin, Zachary Bright, Shitao Tang, Yihui He, Minghao Liu,Ling Zhu,Cindy Le
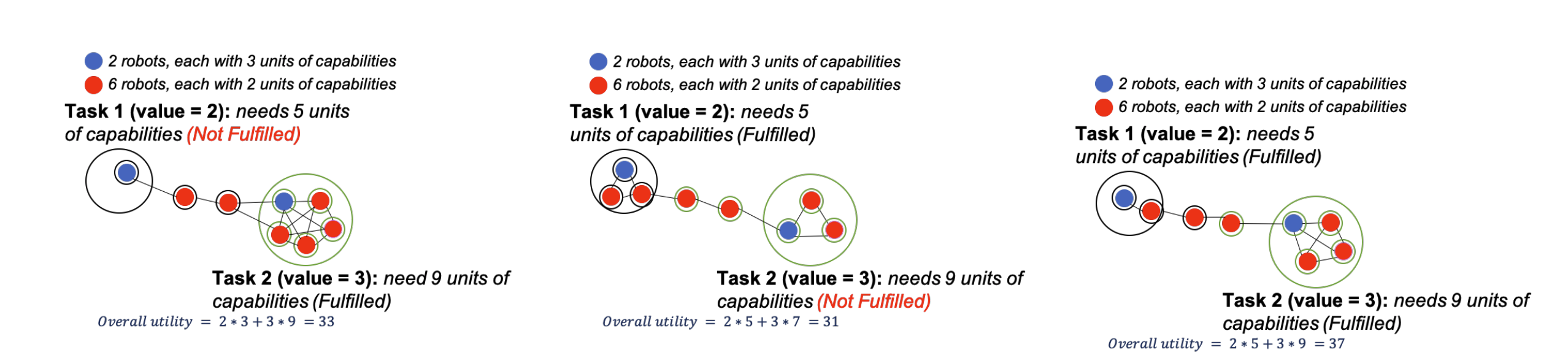
- Online Connectivity-aware Dynamic Deployment for Heterogeneous Multi-robot Systems
IEEE International Conference on Robotics and Automation (ICRA), 2021 (Oral presentation)
Chendi Lin, Wenhao Luo, Katia Sycara
- Online Connectivity-aware Dynamic Distribution for Heterogeneous Multi-Robot Systems
Master Thesis, 2020
Chendi Lin
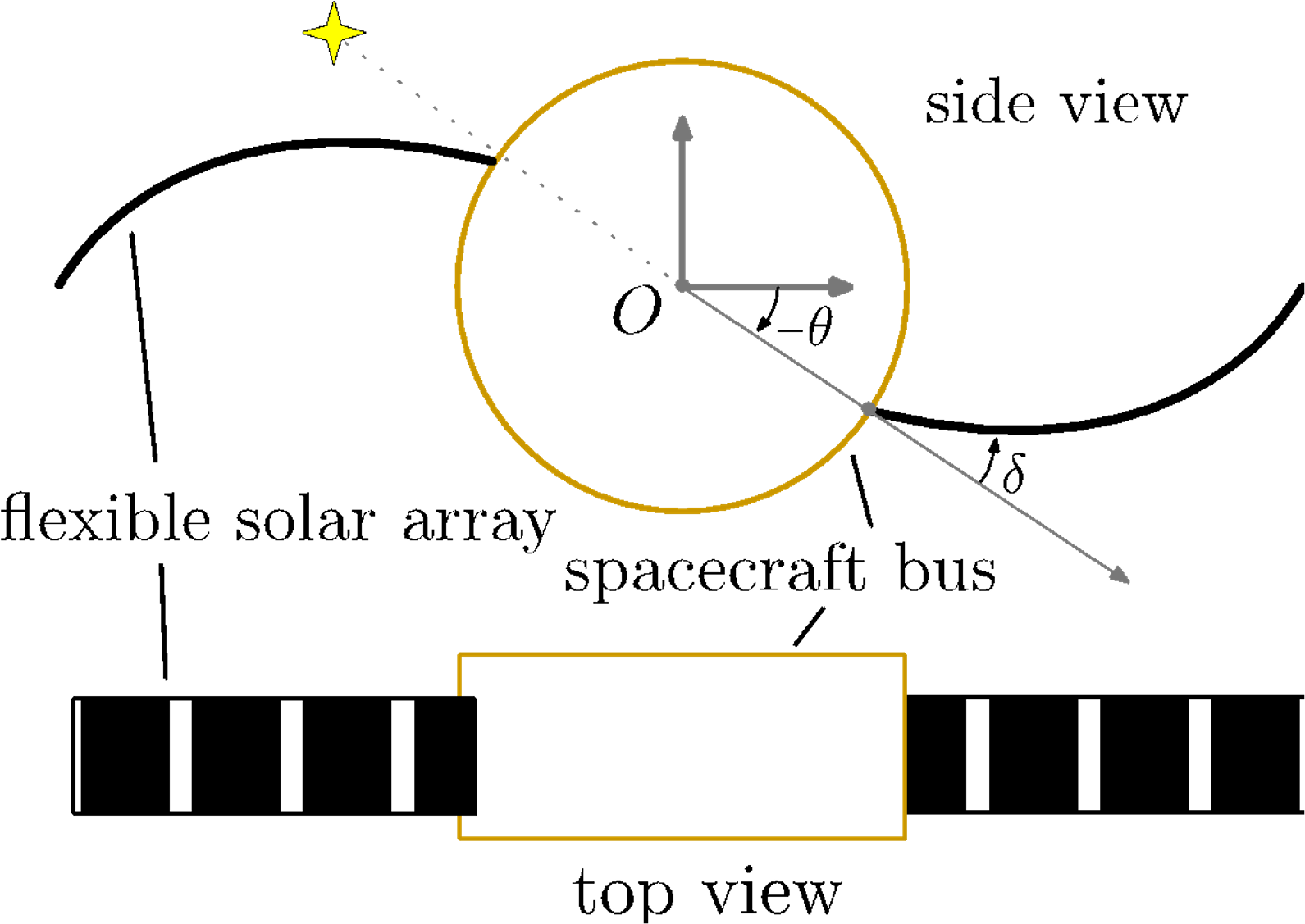
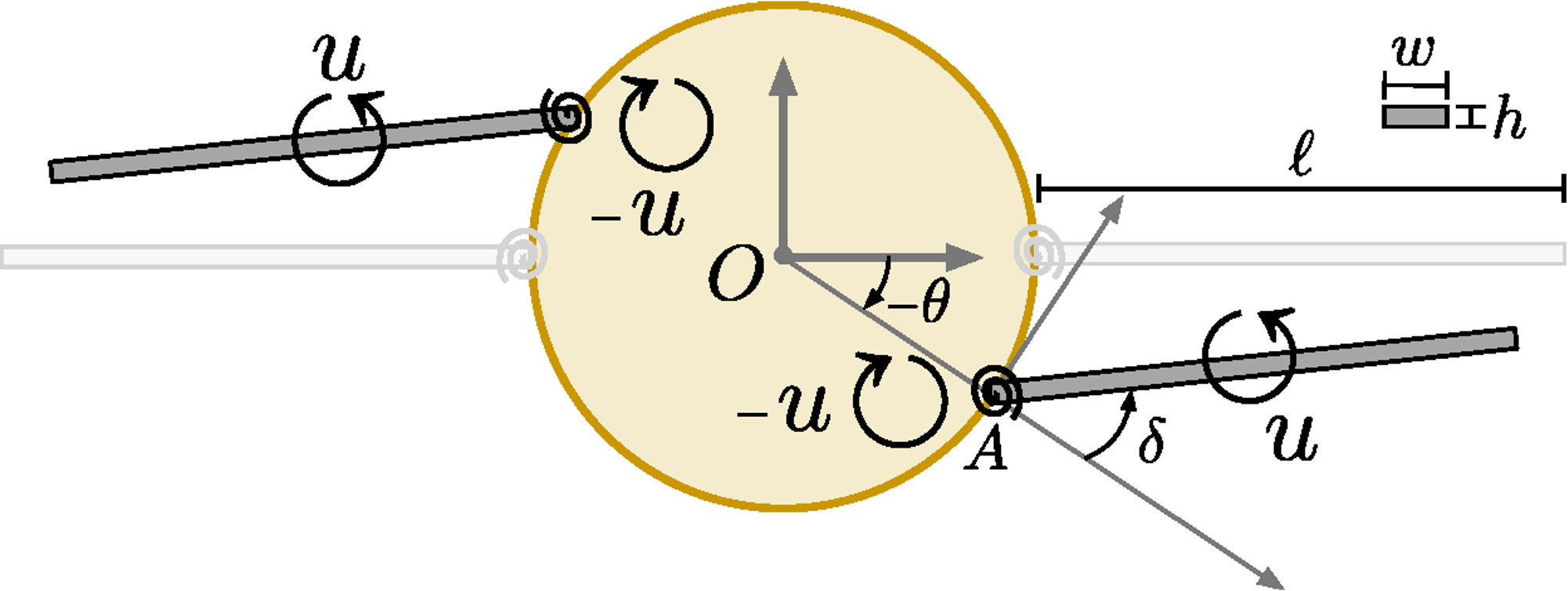
- Attitude Control System Complexity Reduction via Tailored Viscoelastic Damping Co-Design
AAS Rocky Mountain Section (AAS GNC), 2018 (Oral presentation)
Chendi Lin, Daniel R Herber, Yong Hoon Lee, Alexander Ghosh, Randy H Ewoldt, James T Allison
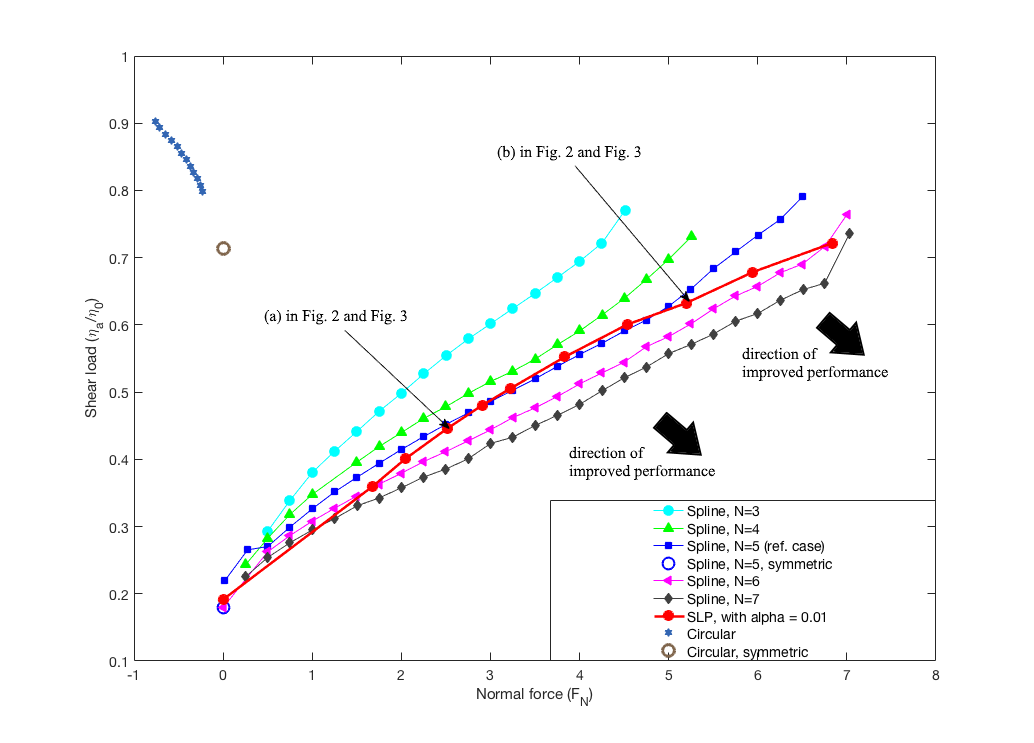
- Efficient Optimal Surface Texture Design Using Linearization
World Congress of Structural and Multidisciplinary Optimisation (WCSMO), 2017 (Oral presentation)
Chendi Lin, Yong Hoon Lee, Jonathon K. Schuh, Randy H. Ewoldt, James T. Allison